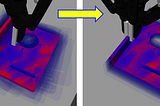
Felix von DrigalskiinOMRON SINIC XUncertainty-Aware Manipulation Planning accepted to RA-L and IROS 2022Our paper was published in IEEE Robotics and Automation Letters. The source code is released along with the full-text paper.Oct 14, 2022Oct 14, 2022
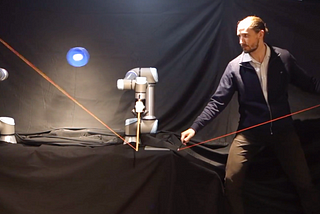
Felix von DrigalskiinOMRON SINIC XAn analytical diabolo model for robotic learning and controlAt OMRON SINIC X, we made two robot arms play diabolo and are preparing to release the simulation model, dataset and control algorithm.Nov 20, 2020Nov 20, 2020
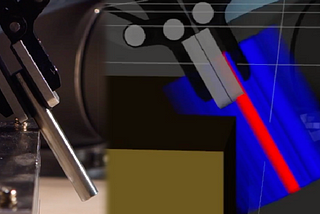
Felix von DrigalskiinOMRON SINIC XWhat is In-Hand Pose Estimation?A robot’s representation of its environment is never perfect. When the robot grasps an object, there will generally be a slight offset, so…Jun 1, 2020Jun 1, 2020
Felix von DrigalskiinOMRON SINIC X2 papers accepted to ICRA 2020It is our pleasure to announce that two of our papers have been accepted to ICRA 2020 in Paris!Jan 23, 2020Jan 23, 2020
Felix von DrigalskiinOMRON SINIC XWorld MoveIt Day 2019 @ OMRON SINIC XAt OMRON SINIC X, we use MoveIt to work with our collaborators in universities and research institutes and plan high-level operations. For…Nov 28, 2019Nov 28, 2019
Felix von DrigalskiinOMRON SINIC XCall for Interns (Robotics Track, available immediately)At OMRON SINIC X Corporation, a research start-up located next to the University of Tokyo, Japan, we are looking for highly-motivated…Oct 28, 2019Oct 28, 2019