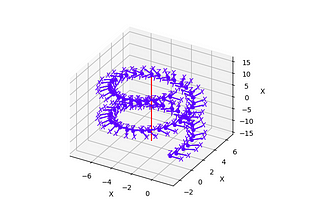
Tahsincan KoseRelationship Between Plücker, Screw, and Twist CoordinatesTwists are essential geometric constructs in Robotics, as they can adequately express the motion of a rigid body in Euclidean space.Feb 12, 2023Feb 12, 2023
Tahsincan KoseCustom Manipulator Simulation in Gazebo and Motion Planning with MoveIt!State-of-the-art robotics applications require tedious testing beforehand. As we all know now, simulations provide great value for the…Sep 4, 20195Sep 4, 20195
Tahsincan KoseinThe StartupSetting up an Ad-Hoc Mesh Network with Raspberry Pi 3B+ using BATMAN-AdvAn ad-hoc mesh network implies a leader-less topology, in which all of the belonging nodes cooperate on the distribution of the data…Jul 26, 2019Jul 26, 2019
Tahsincan KoseImplementing DJI M100 Emulator in ROS-Gazebo for HITLNowadays aerial robots, or drones in popular sense, are used ubiquitously in our daily life. Although their true potential is not…May 16, 20191May 16, 20191
Tahsincan KoseCross Compiling ROS Project for ARMIn these days, embedded platforms are more ubiquitous than ever regarding to their daily usage. Due to its low cost and efficiency, ARM is…Feb 12, 20198Feb 12, 20198
Tahsincan KoseA Decent Integration of VSCode to ROSWell, it is every newbie ROS developer’s desire to have the tools of everyday software developers. I remember saying myself “If only I…Dec 18, 20184Dec 18, 20184