How visible is Austria at major robotics conferences?
An analysis of robotics conferences of the past four years shows that Austria has relatively low visibility. It also shows that expertise is distributed among a handful of universities.
Scientific results in robotics are published at conferences and in journals. It is often said and also indicated by Google Scholar Metrics that the three most important conferences in this field are the following:
- IEEE Intern. Conf. on Robotics and Automation (ICRA)
- IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems (IROS)
- Robotics: Science and Systems (RSS)
ICRA and IROS are two very large conferences of the IEEE Robotics and Automation Society. ICRA attracts about 3,000 visitors presenting 1,000 papers and dozens of companies that exhibit their products. Some well-known robotics groups publish more than ten papers at ICRA each year. Despite its rather high acceptance rate of about 30–40 %, it is for sure one of the most important robotics events to attend and to present at. IROS is of similar size and importance. RSS is a small, single-track conference with an elaborate, double-blind review process and open access publication. The number of RSS papers is in the order of 50 with an acceptance rate of about 20–30 %.
Being a researcher in this field in Austria, I was interested as to which universities and research institutions from my country publish at these three conferences. Therefore, I analyzed the authors lists of the past four years. The resulting numbers can be summarized as follows (Note: Column sums exclude double counting of joint publications):
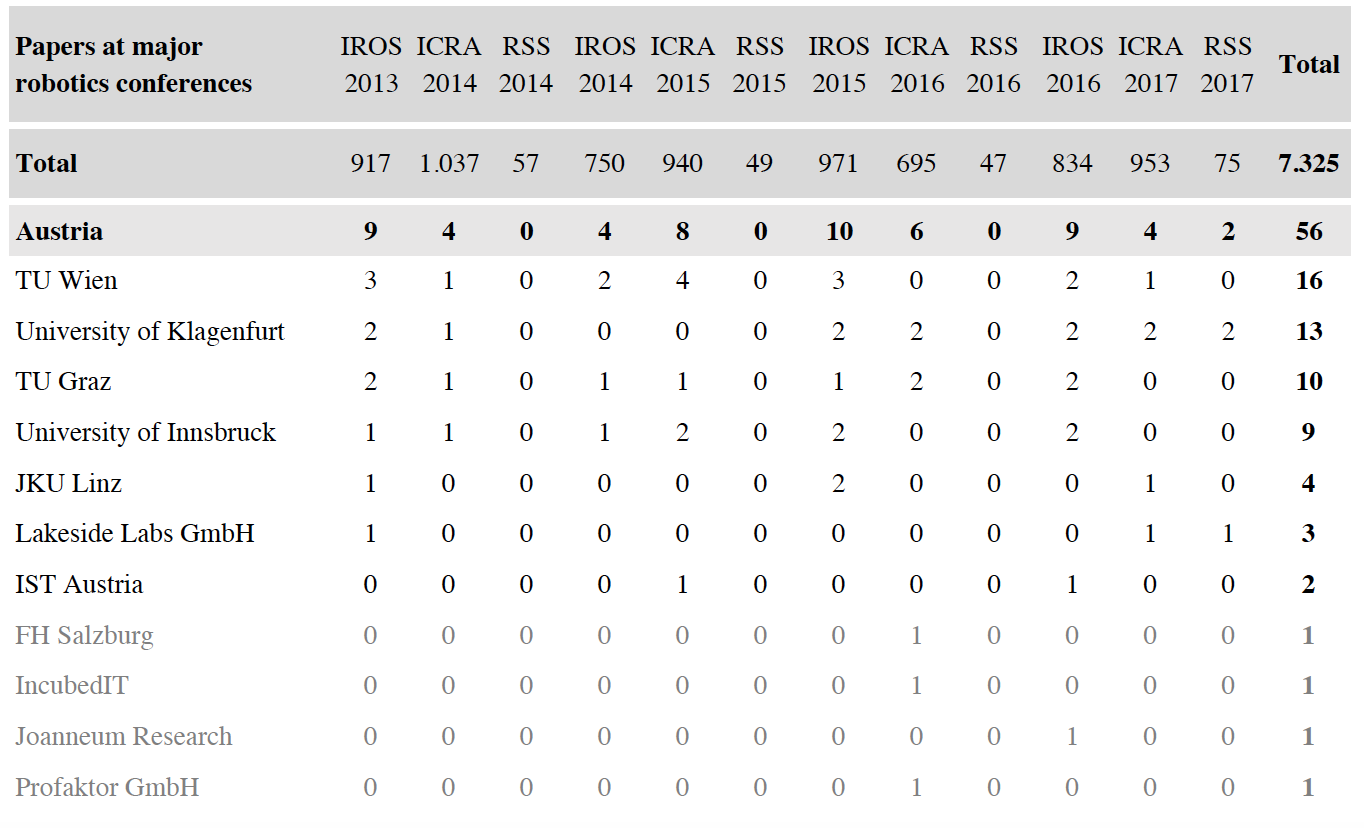
Let me now interpret these figures. First, there are 56 papers with Austrian participation among the total of 7.325, which is below 1 %. In my opinion, this visibility is much too low for a country striving to become an innovation leader and currently re-emphasizing novel approaches for production, dubbed “industry 4.0,” where robotics will play a major role in. Second, it seems that robotics expertise is distributed among a handful of Austrian universities — it is not only concentrated at the two technical universities TU Wien and TU Graz, who are scientific leaders in several engineering disciplines in Austria. It might also be that both tech universities publish at more specialized conferences, e.g., in computer vision for robotics. Leading in terms of papers is the Automation and Control Institute at TU Wien. Third, there is only one paper with a single author participation from a Fachhochschule (FH), which implies that FHs are currently of minor significance in robotics research. Fourth, based on these figures, the University of Klagenfurt — my university — does play a certain role in the Austrian robotics research.
Comment (July 2017): Some papers presented at IROS or ICRA appear in the IEEE Robotics and Automation Letters. They are not considered in the above statistics as they did not appear in the conference proceedings. Some papers from Austria also fall into this category (e.g., two ICRA 2016 papers from TU Wien). They will be considered in a revised and updated version in some years.
Christian Bettstetter is professor for mobile systems at the Institute of Networked and Embedded Systems at the University of Klagenfurt and scientific director of Lakeside Labs GmbH. His department has been offering the study branch “autonomous systems and robotics” in their master level program since 2016. A research emphasis in Klagenfurt is aerial robotics, for which a Karl Popper Science Kolleg and doctoral school will be established in October 2017, along with several more applied projects.
Publications
TU Wien (Vienna)
Patrik Zips, Martin Bock and Andreas Kugi. A fast motion planning algorithm for car parking based on static optimization. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Luis A. Mateos, Marcos Rodriguez Dominguez, and Markus Vincze. Automatic in-pipe robot centering from 3D to 2D controller simplification. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Photchara Ratsamee, Yasushi Mae, Amornched Jinda-apiraksa, Jana Machajdik, Kenichi Ohara, Masaru Kojima, Robert Sablatnig, and Tatsuo Arai. Lifelogging keyframe selection using image quality measurements and physiological excitement features. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Ekaterina Potapova, Karthik M. Varadarajan, Andreas Richtsfeld, Michael Zillich, and Markus Vincze. Attention-driven object detection and segmentation of cluttered table scenes using 2.5D symmetry. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2014.
P. de la Puente, M. Bajones, P. Einramhof, D. Wolf, D. Fischinger and M. Vincze. RGB-D sensor setup for multiple tasks of home robots and experimental results. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.
Aitor Aldoma, Thomas Fäulhammer, and Markus Vincze. Automation of “ground truth” annotation for multi-view RGB-D object instance recognition datasets. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.
Patrik Zips, Martin Böck, and Andreas Kugi. An optimisation-based path planner for truck-trailer systems with driving direction changes. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Daniel Wolf, Johann Prankl, and Markus Vincze. Fast semantic segmentation of 3D point clouds using a dense CRF with learned parameters. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Thomas Fäulhammer, Aitor Aldoma, Michael Zillich, and Markus Vincze. Temporal integration of feature correspondences for enhanced recognition in cluttered and dynamic environments. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Germán M. García, Ekaterina Potapova, Thomas Werner, Michael Zillich, Markus Vincze, and Simone Frintrop. Saliency-based object discovery on RGB-D data with a late-fusion approach. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Richard Bormann, Joshua Hampp, Martin Hägele, and Markus Vincze. Fast and accurate normal estimation by efficient 3D edge detection. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Johann Prankl, Aitor Aldoma, Alexander Svejda, and Markus Vincze. RGB-D object modelling for object recognition and tracking. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Denise Ratasich, Bernhard Frömel, Oliver Höftberger, and Radu Grosu. Generic sensor fusion package for ROS. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Sergey V. Alexandrov, Johann Prankl, Michael Zillich and Markus Vincze. Calibration and correction of vignetting effects with an application to 3D mapping. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
George Todoran, Markus Bader. Expressive navigation and local path-planning of independent steering autonomous systems. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Mohammad Reza Loghmani, Stefano Rovetta, and Gentiane Venture. Emotional intelligence in robots: Recognizing human emotions from daily-life gestures. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2017.
University of Klagenfurt
Sergey Alatartsev, Vera Mersheeva, Marcus Augustine, and Frank Ortmeier. On optimizing a sequence of robotic tasks. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Torsten Andre and Christian Bettstetter. Assessing the value of coordination in mobile robot exploration using a discrete-time Markov process. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Asif Khan, Evsen Yanmaz, and Bernhard Rinner. Information merging in multi-UAV cooperative search. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2014.
Asif Khan, Bernhard Rinner, and Andrea Cavallaro. Multiscale observation of multiple moving targets using micro aerial vehicles. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Stephan Mühlbacher-Karrer, Andre Gaschler, and Hubert Zangl. Responsive fingers — capacitive sensing during object manipulation. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Raheeb Muzaffar, Vladimir Vukadinovic, and Andrea Cavallaro. Rate-adaptive multicast video streaming from teams of micro aerial vehicles. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
Karol Hausman, Stephan Weiss, Roland Brockers, Larry Matthies, and Gaurav S. Sukhatme. Self-calibrating multi-sensor fusion with probabilistic measurement validation for seamless sensor switching on a UAV. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
Pasquale Grippa. Decision making in a UAV-based delivery system with impatient customers. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Bernhard Dieber, Severin Kacianka, Stefan Rass, and Peter Schartner. Application-level security for ROS-based applications. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Samira Hayat, Evsen Yanmaz, Timothy X Brown, and Christian Bettstetter. Multi-objective UAV path planning for search and rescue. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2017.
Karol Hausman, James Preiss, Gaurav Sukhatme, and Stephan Weiss. Observability-aware trajectory optimization for self-calibration with application to UAVs. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2017.
Pasquale Grippa, Doris A. Behrens, Christian Bettstetter, and Friederike Wall. Job selection in a network of UAVs for delivery of goods. In Proc. Robotics: Science and Systems (RSS), 2017.
James Preiss, Karol Hausman, Gaurav Sukhatme, and Stephan Weiss. Trajectory optimization for self-calibration and navigation. In Proc. Robotics: Science and Systems (RSS), 2017.
TU Graz
Thanh Nguyen and Gerhard Reitmayr. Calibrating setups with a single-point laser range finder and a camera. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Thomas Schlegl, Torsten Kröger, Andre Gaschler, Oussama Khatib, and Hubert Zangl. Virtual whiskers — Highly responsive robot collision avoidance. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Christian Mostegel, Andreas Wendel, and Horst Bischof. Active monocular localization: Towards autonomous monocular exploration for multirotor MAVs. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2014.
Matteo Lasagni and Kay Römer. Force-guiding particle chains for shape-shifting displays. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.
Shreyansh Daftry, Christof Hoppe, and Horst Bischof. Building with drones: Accurate 3D facade reconstruction using MAVs. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Rüdiger Ehlers, Robert Könighofer, and Roderick Bloem. Synthesizing cooperative reactive mission plans. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Irene Parada, Vera Sacristán, and Rodrigo I. Silveira. A new meta-module for efficient reconfiguration of hinged-units modular robots. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
Clemens Mühlbacher, Stephan Gspandl, Michael Reip, and Gerald Steinbauer. Improving dependability of industrial transport robots using model-based techniques. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
Werner Alexander Isop, Jesus Pestana, Gabriele Ermacora, Friedrich Fraundorfer, Dieter Schmalstieg. Micro aerial projector — Stabilizing projected images of an airborne robotics projection platform. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Krishna Raj Sapkota, Steven Roelofsen, Artem Rozantsev, Vincent Lepetit, Denis Gillet, Pascal Fua, and Alcherio Martinoli. Vision-based unmanned aerial vehicle detection and tracking for sense and avoid systems. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
University of Innsbruck
Renaud Detry and Justus Piater. Unsupervised learning of predictive parts for cross-object grasp transfer. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
David Martínez, Guillem Alenyà, Pablo Jiménez, Carme Torras, Jürgen Rossmann, Nils Wantia, Eren Erdal Aksoy, Simon Haller, and Justus Piater. Active learning of manipulation sequences. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2014.
Sandor Szedmak, Emre Ugur, and Justus Piater. Knowledge propagation and relation learning for predicting action effects. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.
Emre Ugur and Justus Piater. Bottom-up learning of object categories, action effects and logical rules: From continuous manipulative exploration to symbolic planning. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Özgür Erkent and H. Işıl Bozma. Long-term topological place learning. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Antonio J Rodríguez-Sánchez, Sandor Szedmak, and Justus Piater. SCurV: A 3D descriptor for object classification. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Alejandro Agostini, Mohamad Javad Aein, Sandor Szedmak, Eren Erdal Aksoy, Justus Piater, and Florentin Würgütter. Using structural bootstrapping for object substitution in robotic executions of human-like manipulation tasks. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Simon Hangl, Emre Ugur, Sandor Szedmak, Justus Piater. Robotic playing for hierarchical complex skill learning. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Stefan M. Trenkwalder, Yuri Kaszubowski Lopes, Andreas Kolling, Anders Lyhne Christensen, Radu Prodan, and Roderich Groß. OpenSwarm: An event-driven embedded pperating system for miniature robots. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
JKU Linz
S. Peng, H. Kogler, E. Guglielmino, R. Scheidl, D. T. Branson, and D. G. Caldwell. The use of a hydraulic DC-DC converter in the actuation of a robotic leg. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Matthias Neubauer and Andreas Müller. Smooth orientation path planning with quaternions using B-splines. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Christoph Stöger, Andreas Müller, and Hubert Gattringer. Kinematic analysis and singularity robust path control of a non-holonomic mobile platform with several steerable driving wheels. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
Andreas Müller. Recursive second-order inverse dynamics for serial manipulators. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2017.
Lakeside Labs GmbH
Torsten Andre and Christian Bettstetter. Assessing the value of coordination in mobile robot exploration using a discrete-time Markov process. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2013.
Samira Hayat, Evsen Yanmaz, Timothy X Brown, and Christian Bettstetter. Multi-objective UAV path planning for search and rescue. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2017.
Pasquale Grippa, Doris A. Behrens, Christian Bettstetter, and Friederike Wall. Job selection in a network of UAVs for delivery of goods. In Proc. Robotics: Science and Systems (RSS), 2017.
IST Austria
Krishnendu Chatterjee, Martin Chmelík, Raghav Gupta, and Ayush Kanodia. Qualitative analysis of POMDPs with temporal logic specifications for robotics applications. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
Georg Martius, Rafael Hostettler, Alois Knoll, and Ralf Der. Compliant control for soft robots: emergent behavior of a tendon driven anthropomorphic arm. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
FH Salzburg
Greg Seyfarth, Ankit Bhatia, Olaf Sassnick, Michael Shomin, Masaaki Kumagai, and Ralph Hollis. Initial results for a ballbot driven with a spherical induction motor. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
incubedIT
Clemens Mühlbacher, Stephan Gspandl, Michael Reip, and Gerald Steinbauer. Improving dependability of industrial transport robots using model-based techniques. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.
Joanneum Research
Bernhard Dieber, Severin Kacianka, Stefan Rass, and Peter Schartner. Application-level security for ROS-based applications. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016.
Profaktor GmbH
Sharath Akkaladevi, Martin Ankerl, Christoph Heindl, and Andreas Pichler. Tracking multiple rigid symmetric and non-symmetric objects in real-time using depth data. In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2016.