Ilakkuvaselvi (Ilak) Manoharan167. Unveiling the Dynamics of Change: A System Dynamics ApproachExploring Linear and Nonlinear Systems in Time and Frequency DomainsMar 14
Hsieh, Sheng-HanControl Theory: Separation principle and the Symbiosis between Controller and PlantBackground storyMar 9, 2022Mar 9, 2022
Laukik MujumdarA Visualization for Controllability of Linear SystemsThis post is an attempt to intuitively explain the controllability matrix rank condition of a linear system. Consider the following linear…Oct 24, 2019Oct 24, 2019
InJungletronicsbyJ3Linear Equations —Solve by GAUSS SEIDELHow To Use Python to Solve Linear System #PySeries#Episode 34Aug 20, 2021Aug 20, 2021
Ilakkuvaselvi (Ilak) Manoharan167. Unveiling the Dynamics of Change: A System Dynamics ApproachExploring Linear and Nonlinear Systems in Time and Frequency DomainsMar 14
Hsieh, Sheng-HanControl Theory: Separation principle and the Symbiosis between Controller and PlantBackground storyMar 9, 2022
Laukik MujumdarA Visualization for Controllability of Linear SystemsThis post is an attempt to intuitively explain the controllability matrix rank condition of a linear system. Consider the following linear…Oct 24, 2019
InJungletronicsbyJ3Linear Equations —Solve by GAUSS SEIDELHow To Use Python to Solve Linear System #PySeries#Episode 34Aug 20, 2021
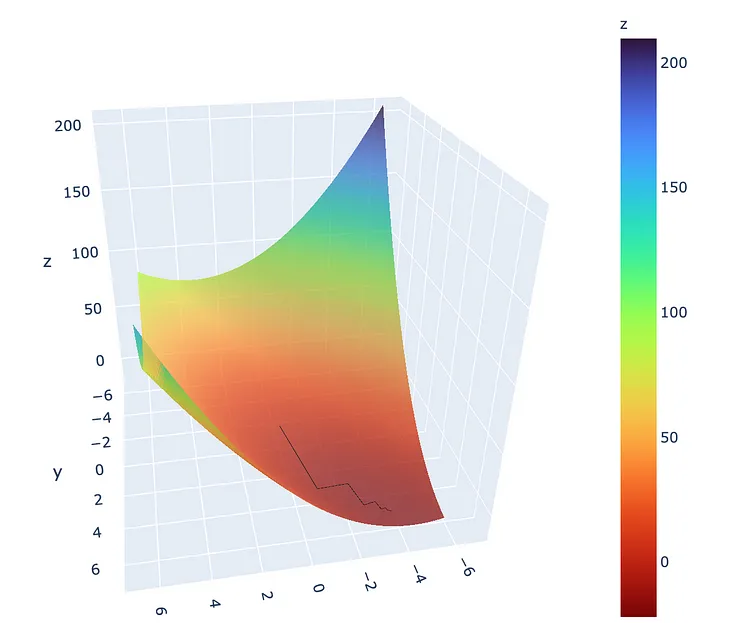
Sophia Yang, Ph.D.Descent method — Steepest descent and conjugate gradient in PythonLet’s start with this equation and we want to solve for x:Sep 12, 2020
InJungletronicsbyJ3Linear Equations — Solve by CREMER RULEHow To Use Python to Solve Linear System #PySeries#Episode 33Aug 20, 2021
InThe StartupbyTiago MiguelUsing an MPC to Control a System: Defining the SystemAn MPC works around a model, let’s define it!Oct 31, 2020