InMiko Engineering BlogbyMiko AIPath-Planning Algorithms: A Comparative Study between A* and D*LiteTesting A* and D* Lite algorithms for robotic navigation in static and dynamic environments, focusing on efficiency, adaptability, etc.Oct 13
InShade RoboticsbyMarcelinaMotion Planning vs Path PlanningImagine you’re building the next big autonomous vehicle. During the phase when testing the car’s ability to travel from one point to…Jun 30, 20221
Ahmad HumaiziGlobal path planningGlobal path planning is a fundamental task in robotics, involving the computation of a feasible path from a start point to a target point…Apr 15Apr 15
AggorjeffersonBuilding an A* Pathfinding Visualizer in Python with PygameIn this article, we’ll create an A* pathfinding visualizer using Python and the Pygame library. Pathfinding algorithms like A* are widely…Oct 11Oct 11
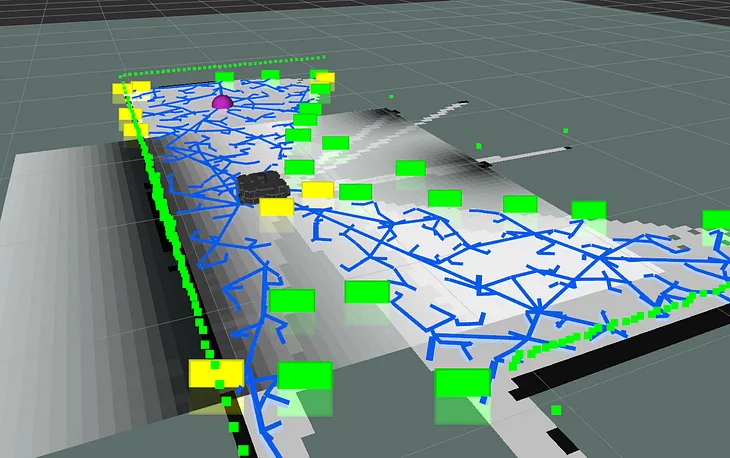
InTowards Data SciencebyMohamed FazilROS Autonomous SLAM using Randomly Exploring Random Tree (RRT)Implementation of the RRT algorithm for unknown environment explorations by the mobile robot Turtlebot3 with the help of ROS’s Navigation…Jan 8, 20214Jan 8, 20214
InMiko Engineering BlogbyMiko AIPath-Planning Algorithms: A Comparative Study between A* and D*LiteTesting A* and D* Lite algorithms for robotic navigation in static and dynamic environments, focusing on efficiency, adaptability, etc.Oct 13
InShade RoboticsbyMarcelinaMotion Planning vs Path PlanningImagine you’re building the next big autonomous vehicle. During the phase when testing the car’s ability to travel from one point to…Jun 30, 20221
Ahmad HumaiziGlobal path planningGlobal path planning is a fundamental task in robotics, involving the computation of a feasible path from a start point to a target point…Apr 15
AggorjeffersonBuilding an A* Pathfinding Visualizer in Python with PygameIn this article, we’ll create an A* pathfinding visualizer using Python and the Pygame library. Pathfinding algorithms like A* are widely…Oct 11
InTowards Data SciencebyMohamed FazilROS Autonomous SLAM using Randomly Exploring Random Tree (RRT)Implementation of the RRT algorithm for unknown environment explorations by the mobile robot Turtlebot3 with the help of ROS’s Navigation…Jan 8, 20214
Ahmad HumaiziThe Fuzzy Logic method in path planning is a robust computational paradigm that uses the…Application and EfficacyApr 15
Fouad SmaouiSmart Navigation in Warehouses: Dijkstra’s Algorithm for Mobile Robot Path PlanningIn the era of Industry 4.0, automation and robotics play a crucial role in enhancing operational efficiency within warehouses. Mobile…Jun 9
Ahmad HumaiziVoronoi diagram method in Path PlanningThe Voronoi diagram method is a significant approach in the realm of path planning. This method constructs a Voronoi diagram which divides…Apr 15