friendlydroidOptiTrack Tricks: Calibration and Tracking Rigid BodiesThis post covers how to calibrate the OptiTrack system, and how to make create a unique rigid body using a universal marker.May 9May 9
friendlydroidROS + Docker [1/4]: Get your ROS environment up and running BASICKickstart your robotics journey with ROS & Docker! 🚀🐳 Learn the essentials of setting up and customizing your ROS programming…Feb 14Feb 14
friendlydroidWondering about how to set up Weaviate? Docker + Python + Builder PatternWondering how to get production ready code + database set up? The post covers the setup process, including configuring persistent volumes…Nov 23, 2023Nov 23, 2023
friendlydroidLearning RPLIDAR with Jetson Nano: A Fun and Easy Set-Up Guide to Robot SLAMEasy-to-follow tutorial on setting up RPLIDAR with a Jetson Nano for indoor SLAM applications. Learn how to leverage the Robot Operating…Nov 21, 2023Nov 21, 2023
friendlydroidConnecting to TIAGO with SSH, using ROS1 and publishing a TOPIC which sends “Hello World!”Connect to TIAGo (ROS1), explain how the connection works, and take the first steps to publishing a std_msgs topic + subscribe it!Nov 19, 2023Nov 19, 2023
friendlydroidframework for integrating apps apis and llmsfastapi setup for llm connection to openapiNov 13, 2023Nov 13, 2023
friendlydroidDunders? Its a kind of magic…Dunders, also known as double underscore functions or magic methods, are an integral part of Python’s object-oriented programming.May 31, 2023May 31, 2023
friendlydroidObject Detection: Retraining YOLOv5 on Custom Data V1Sharing the process on how to fine-tune YOLO on your own dataset is very, and some lessons learned for future implementations.Apr 8, 2023Apr 8, 2023
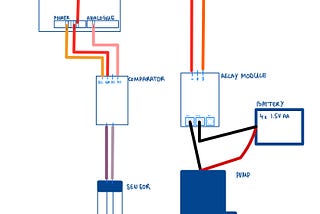
friendlydroidThe Plant Saver: A Simple Automatic Irrigation System“You’re either the one that creates the automation or you’re getting automated.” ~ Tom Preston-WernerMar 19, 2023Mar 19, 2023


![ROS + Docker [1/4]: Get your ROS environment up and running BASIC](https://miro.medium.com/v2/resize:fill:160:106/1*AsVaA4wCrxRKW9rdo2J9wA.png)
![ROS + Docker [1/4]: Get your ROS environment up and running BASIC](https://miro.medium.com/v2/resize:fill:320:214/1*AsVaA4wCrxRKW9rdo2J9wA.png)