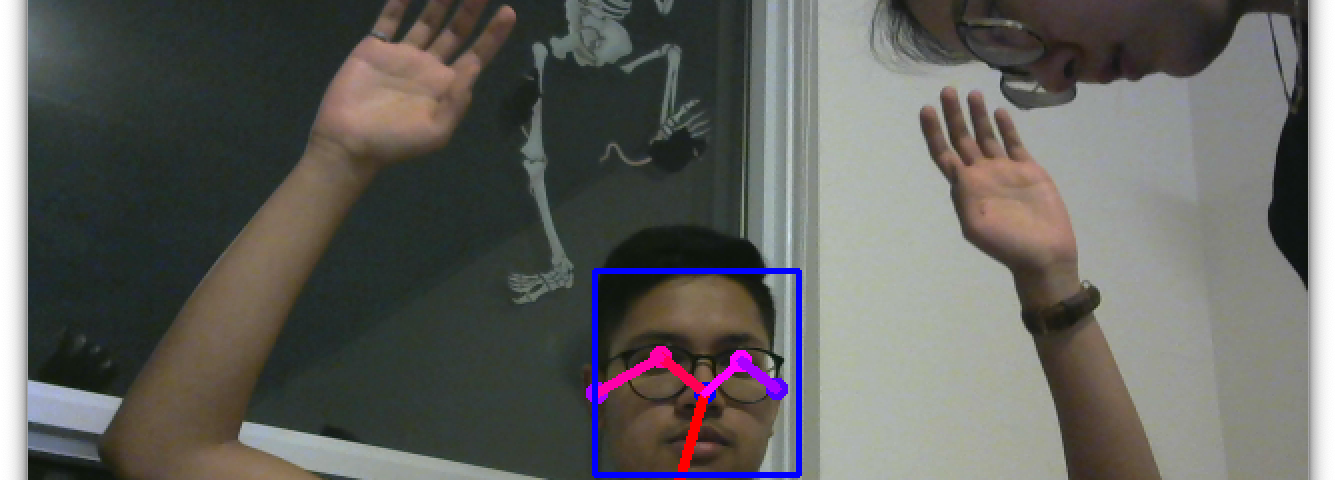
Intelligence lead Nick here is seen talking patiently with our robot, which is learning…
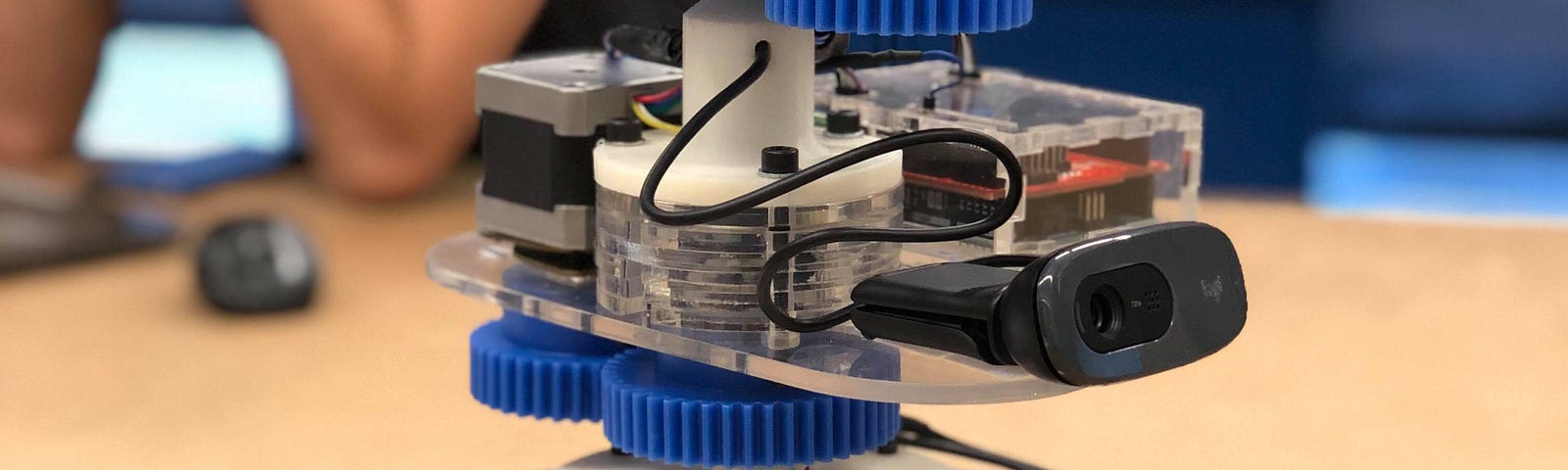
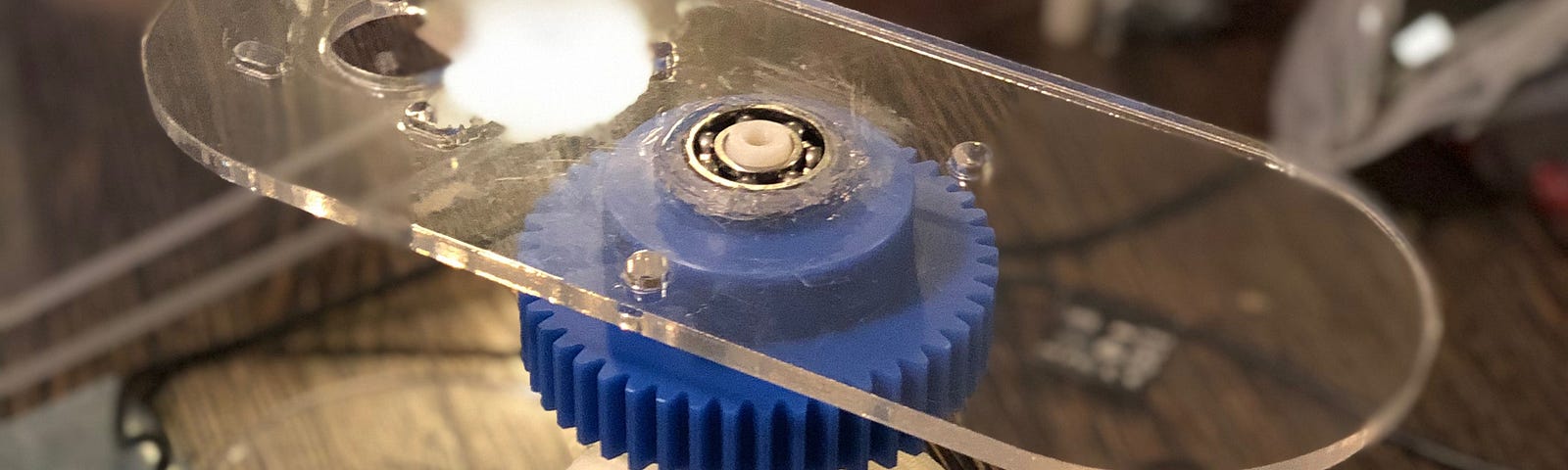
This acrylic box-cut attachment created in Solidworks and cut in a WatIMake-clinic laser-cutter…
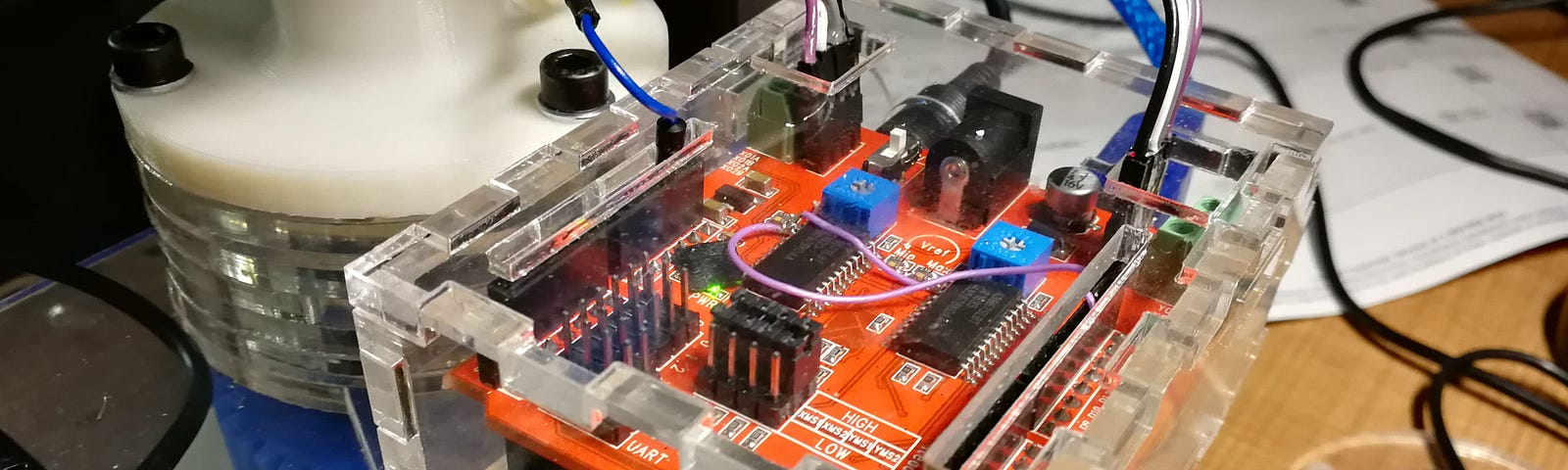
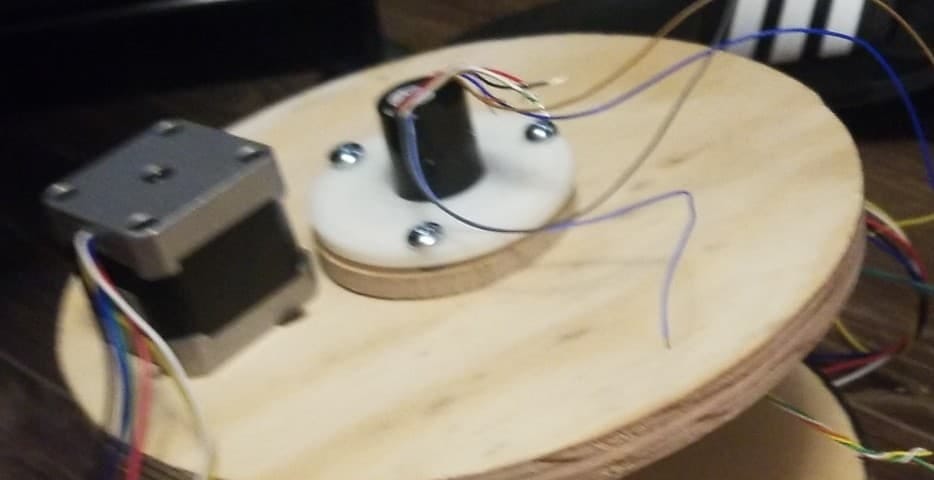
A precarious bring-up of the gearing system. Take note of the motor wiring being held still by Nicholash…
The University of Waterloo Rapid Prototyping Center was used in tandem with the WatIMake clinic…
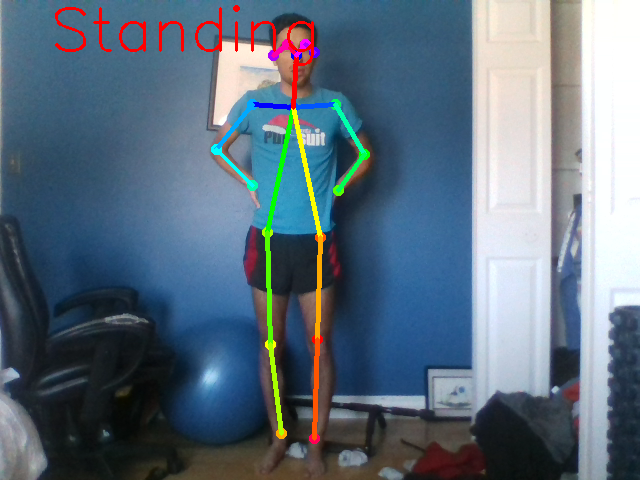
Our in-house trained PoseScore neural network was created with annotated images captured on webcam systems in…
We’re using the tensorflow port of the OpenPose network from CMU to extract human pose skeletons in image coordinate space.
By using the ReSpeaker array, a stepper motor can re-orient towards the direction of arrival of speech inputs