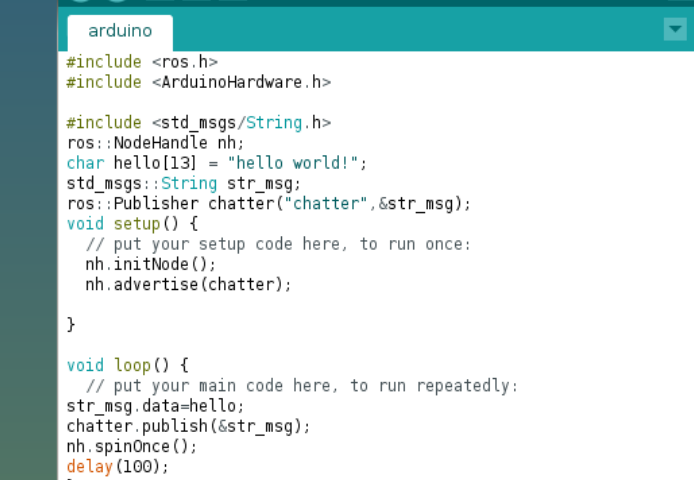
Key C++ code:
ros::Publisher cloud_pub=nh.advertise("lidar_cloud",1);pcl::PointCloud cloud;sensor_msgs::PointCloud2 output;pcl::io::loadPCDFile("/home/a/pcd/1.pcd",cloud)…
When the node that publishes the topic is running, you can list the currently…
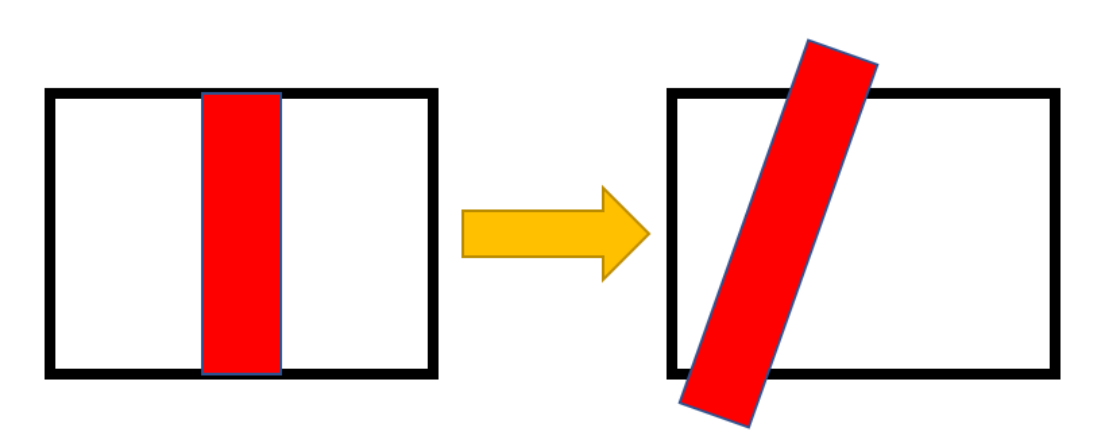
When I recently wrote an article, I found that inserting some very long images in markdown would look bad, so I went to check out how to achieve side-by-side display of images in markdown. The method is as follows: