Key C++ code:
ros::Publisher cloud_pub=nh.advertise("lidar_cloud",1);pcl::PointCloud cloud;sensor_msgs::PointCloud2 output;pcl::io::loadPCDFile("/home/a/pcd/1.pcd",cloud)…
When the node that publishes the topic is running, you can list the currently…
When I recently wrote an article, I found that inserting some very long images in markdown would look bad, so I went to check out how to achieve side-by-side display of images in markdown. The method is as follows:
The official SDK of DJI is rather lazy. It only wrote a general outline in the part of…
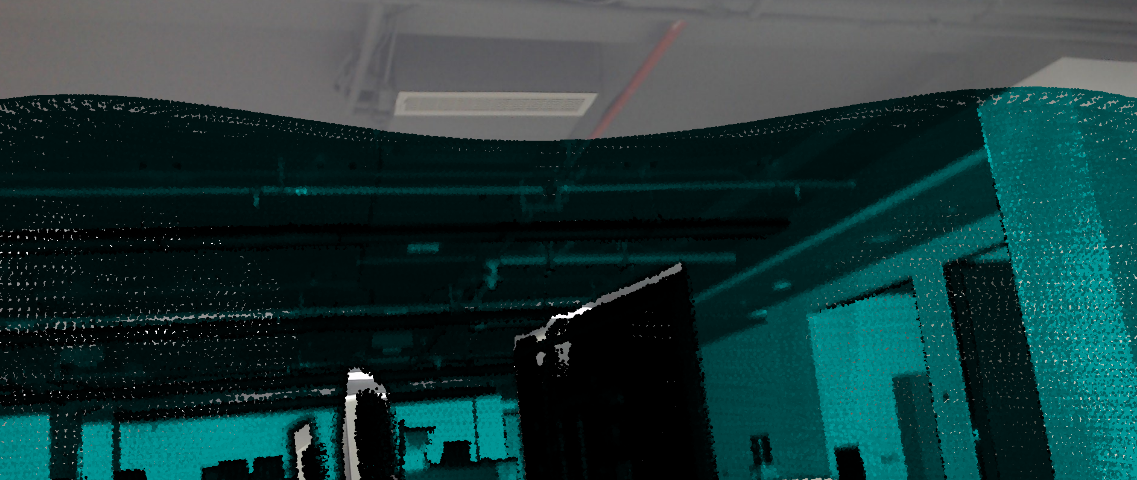
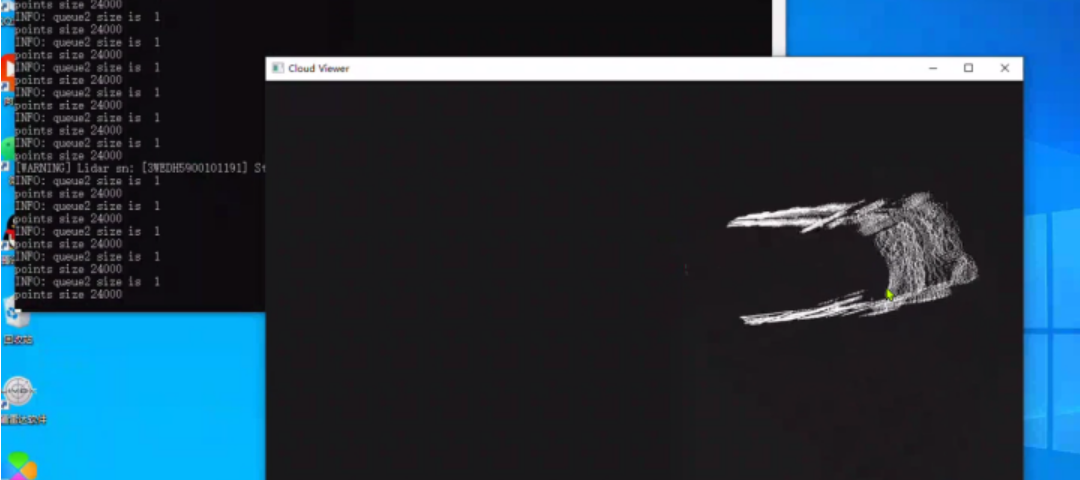
The LVX file is parsed according to DJI’s protocol and displayed with open3d. The LVX file is the Horizon radar data downloaded from DJI’s official website, and other radar data should also be parsed.
Just Change the launch file to, add group to a node , launch a node in another group .
Here is a ouster lidar launch file example:
<launch> <!-- For First --> <arg…