Tagged in
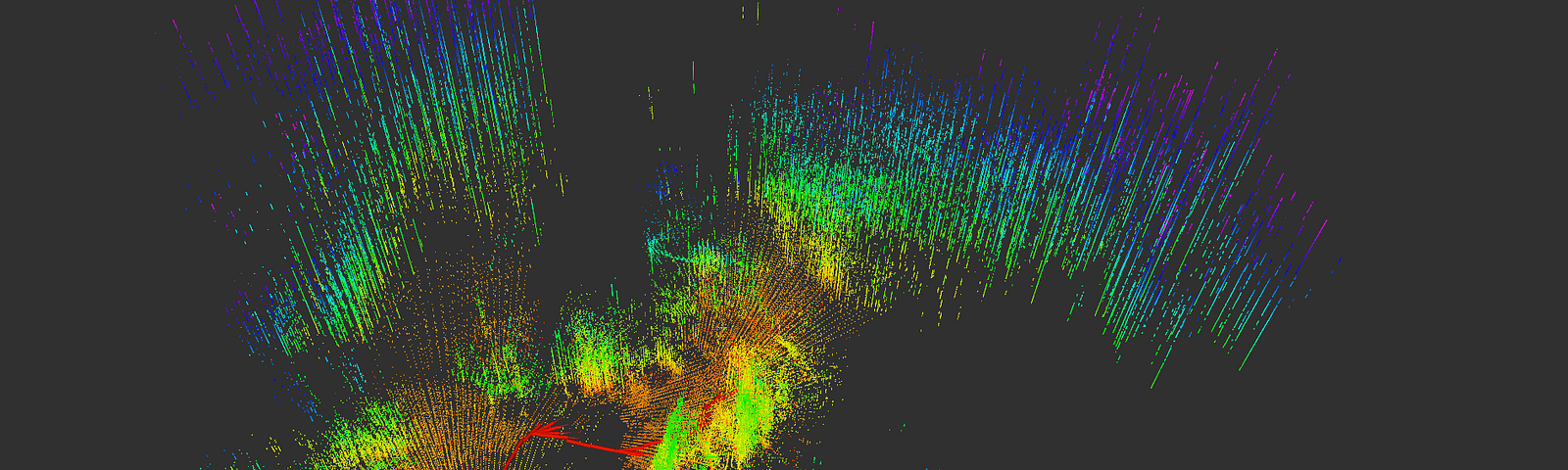
Point Cloud
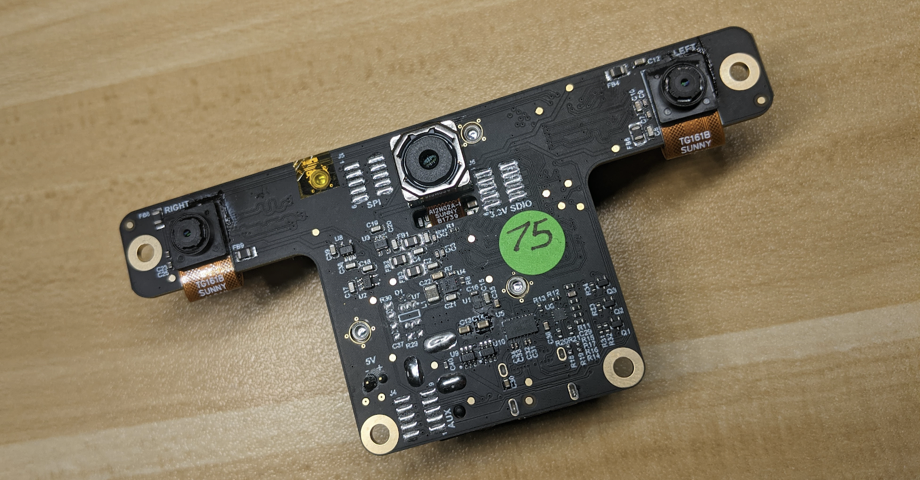
The Inverse Project
A place for us to journal our progress through the OpenCV Spatial AI Competition 2020, where we are using OpenCV’s OAK-D Spatial AI sensor to solve the Pose-landmark Indoor SLAM problem.
More informationFollowers
More, on Medium