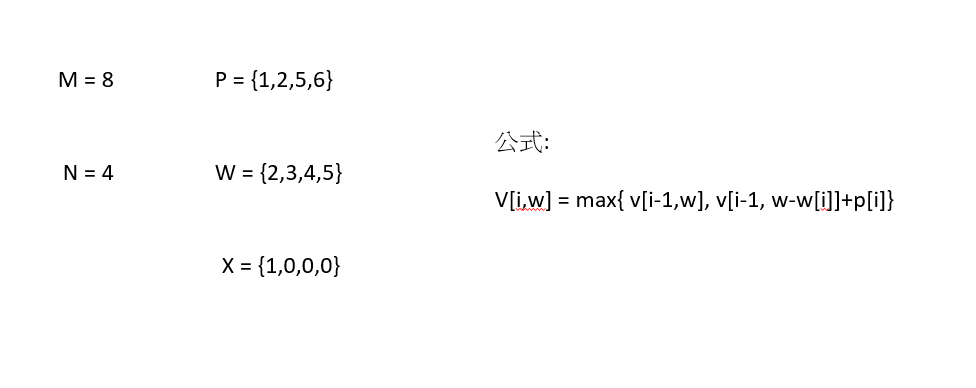
Dynamic Programming
Tabulation
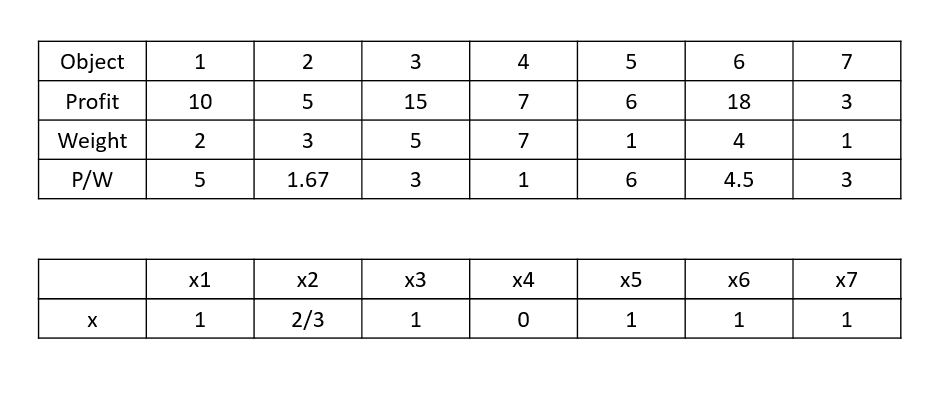
greedy
。fraction
Constraint
Objective
Backtracking or Dynamic programming
back track method
##backtrack tech1,2,3,4,5,6,11,2,6,5,4,3,11,6,2,5,4,3,12,3,4,5,6,1,2(跟第一列相同)
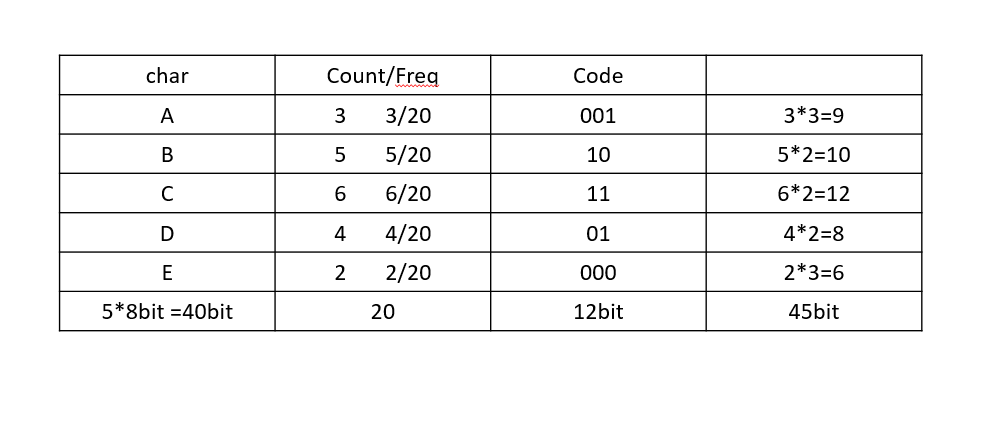
有一message → BCCABBDDAECCBBAEDDCC
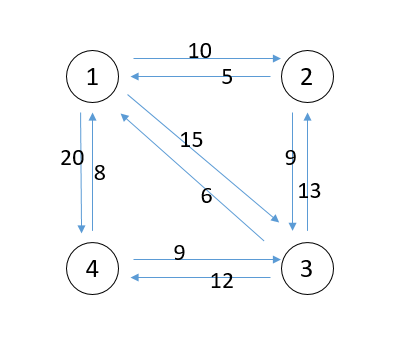
Dynamic programming
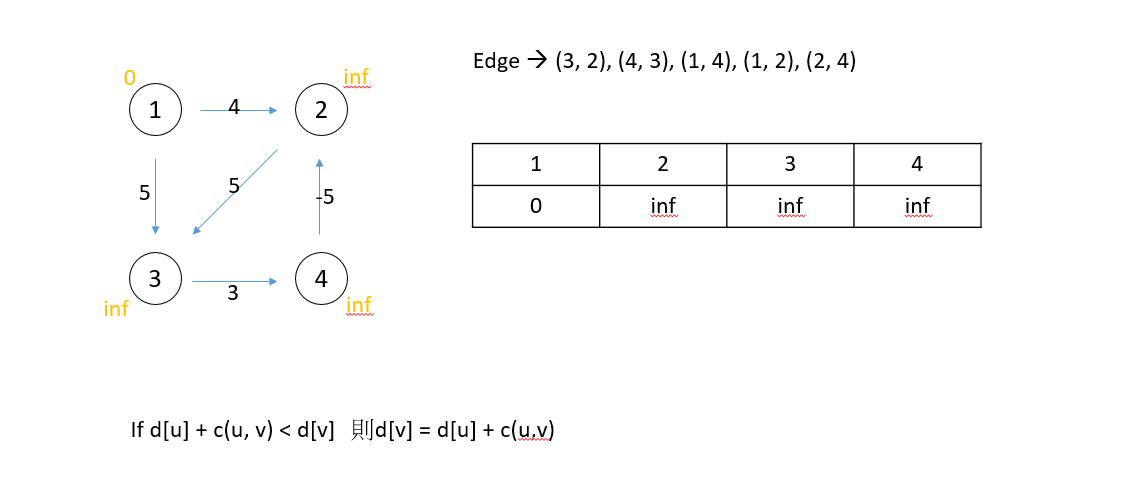
All pairs shortest path
Relaxation
After relaxation
時間複雜度O(V*V*V)
Path
note
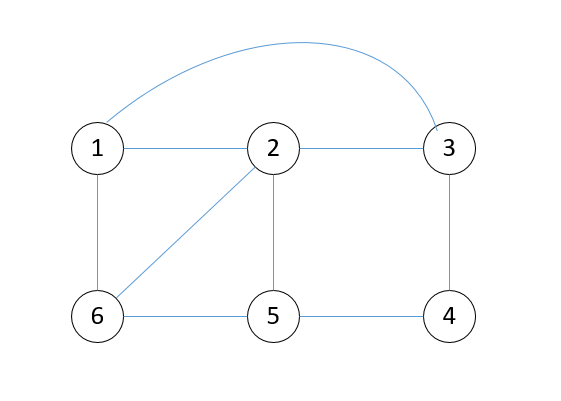
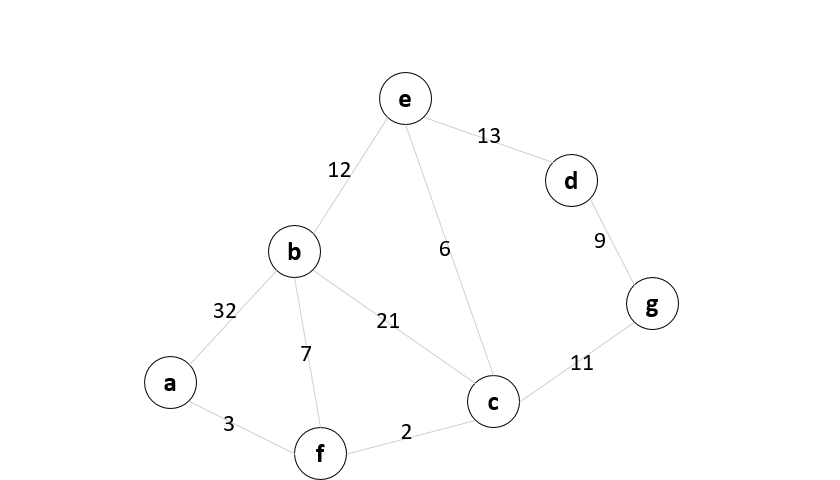
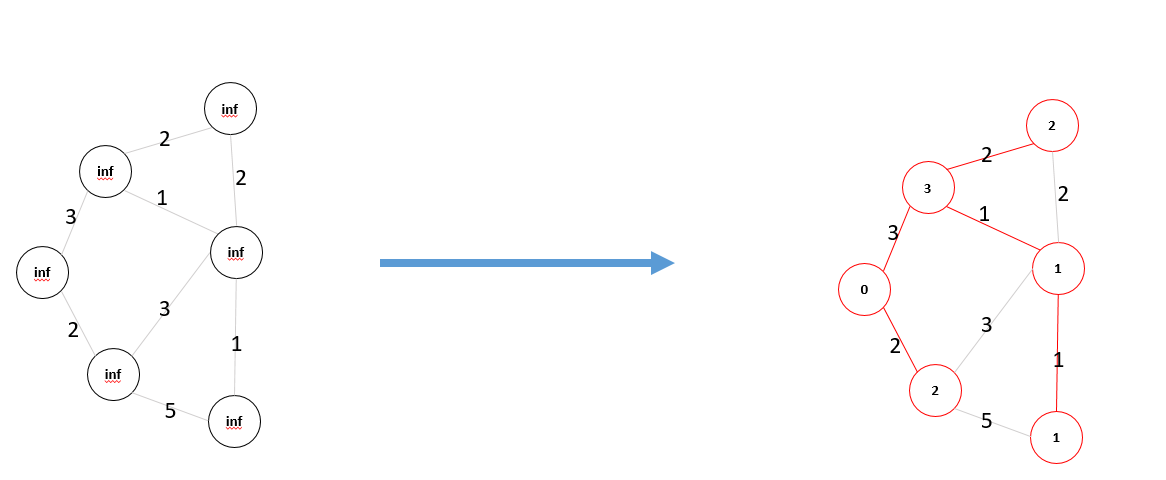
。Spanningt Tree(生成樹)
。MST只有一個,可以用以下兩種方法去找
→ Kruskal’s Algo.(link)
→ Prim’s Algo.(link)
。Spanningt Tree
Relaxtion based
時間複雜度:O(V*V)