From Solidworks to Gazebo
http://wiki.ros.org/camera_calibration#Tutorials
$ sudo sudo apt-get install libcwiid-dev && apt-get install libbluetooth-dev && apt-get install libspnav-dev && apt-get install…
apt-get install libbluetooth-dev &&
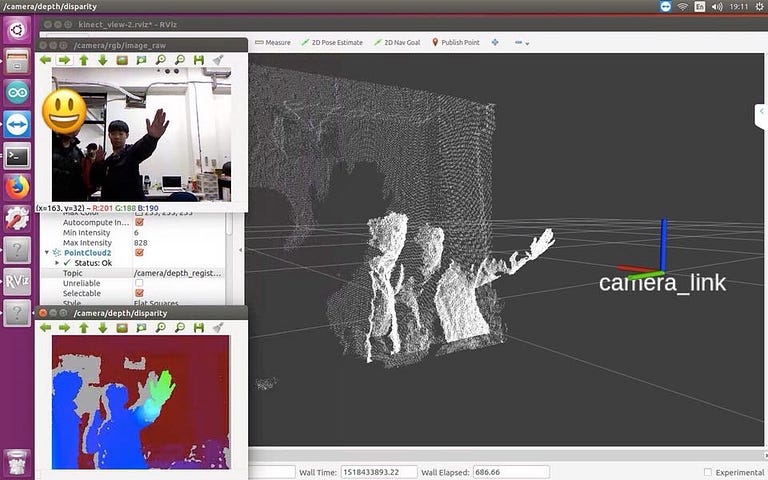
kinect 為微軟開發之體感產品,玩家可以不透過任何遙控裝置,直接使用肢體動作操控遊戲,因為其中kinrct 是RGB-D攝影機,除了色彩還可以偵測深度。
繼上一篇安裝完pi之後,當然就要與電腦做連結拉,直他們之間的連結是透過 Master & Slave 連結
安裝ROS 在Rsapberry pi 3 的方法跟<專題筆記:ROS #1>一樣,可以測試roscore就好,其他的因為pi效能不足可能會當機,安裝完後再來安裝Arduino
$ sudo apt-get update
$ sudo apt-get install arduino arduino-core
$ sudo apt-get install…
相信都看過先前的文章,現在應該都有個疑問?ROS端要怎麼訂閱與發佈?
ROS code的語言可以使用 python 及 C++,但我只會著墨在python部分
先看看官方網站怎麼說: