在過去還沒有 ROS 的年代,我們要去設計一款機器人是非常困難的,而這邊的機器人是一個統稱,並非只單針對人型、輪型、服務型等機器人。假設我們想要去設計一款機器人,我們需要完成以下這些項目,才能製造出我們要的機器人,那有哪些呢?
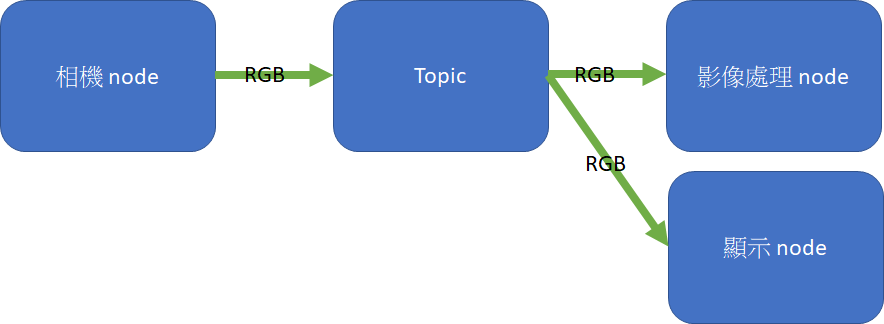
今天我們要來講 ROS 中最為核心的部分,ROS 提供了 四種通訊方式,分別為 Topic、Service、Parameter Service 、Actionlib
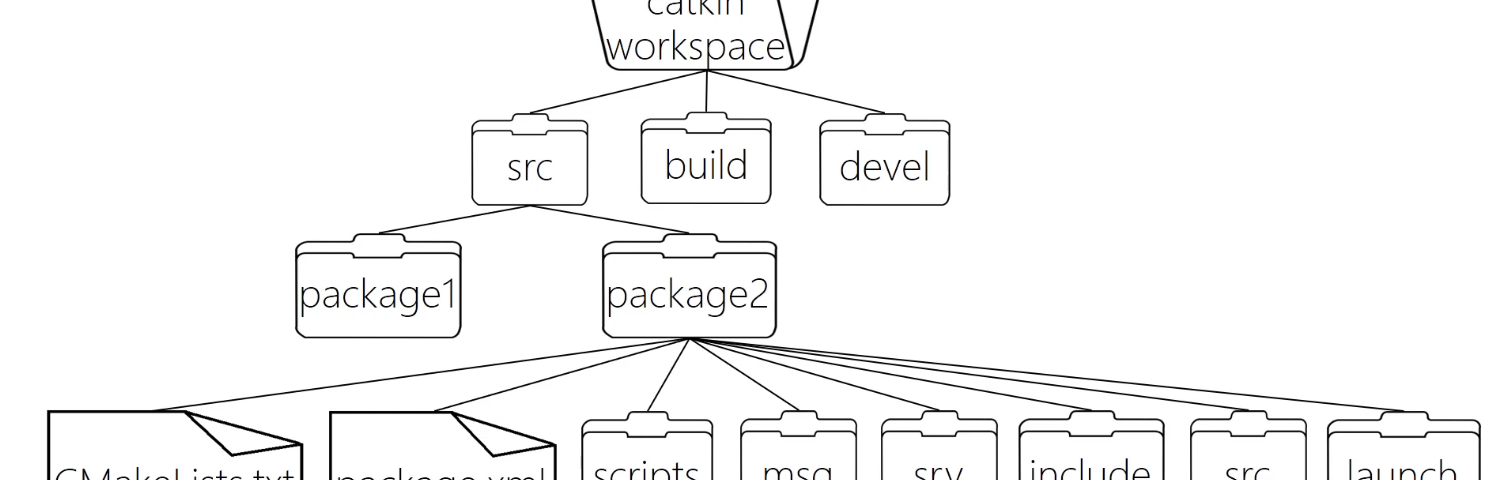
今天我們要來講 ROS 的文件系統,在 ROS 的檔案夾中,他會長下面這個樣子
你可能會覺得很複雜,接下來便一個一個來講他是幹嘛的。
今天要來說明 ROS 怎麼安裝,今天會分成 Ubuntu18.04 跟 Windwos 兩個版本來講~
在前幾天我們將我們的 ROS 環境給搭建起來了,並且知道了大部分的架構,接下來就準備開始運行我們的程式碼,但在運行之前,我們必須要知道整個通訊架構。