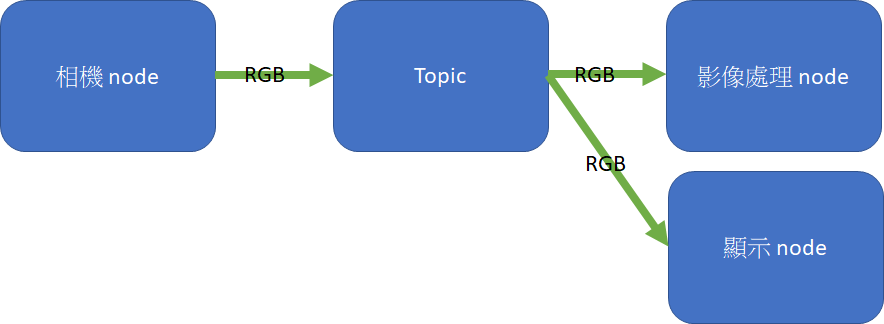
今天我們要來講 ROS 中最為核心的部分,ROS 提供了 四種通訊方式,分別為 Topic、Service、Parameter Service 、Actionlib
在前幾天我們將我們的 ROS 環境給搭建起來了,並且知道了大部分的架構,接下來就準備開始運行我們的程式碼,但在運行之前,我們必須要知道整個通訊架構。
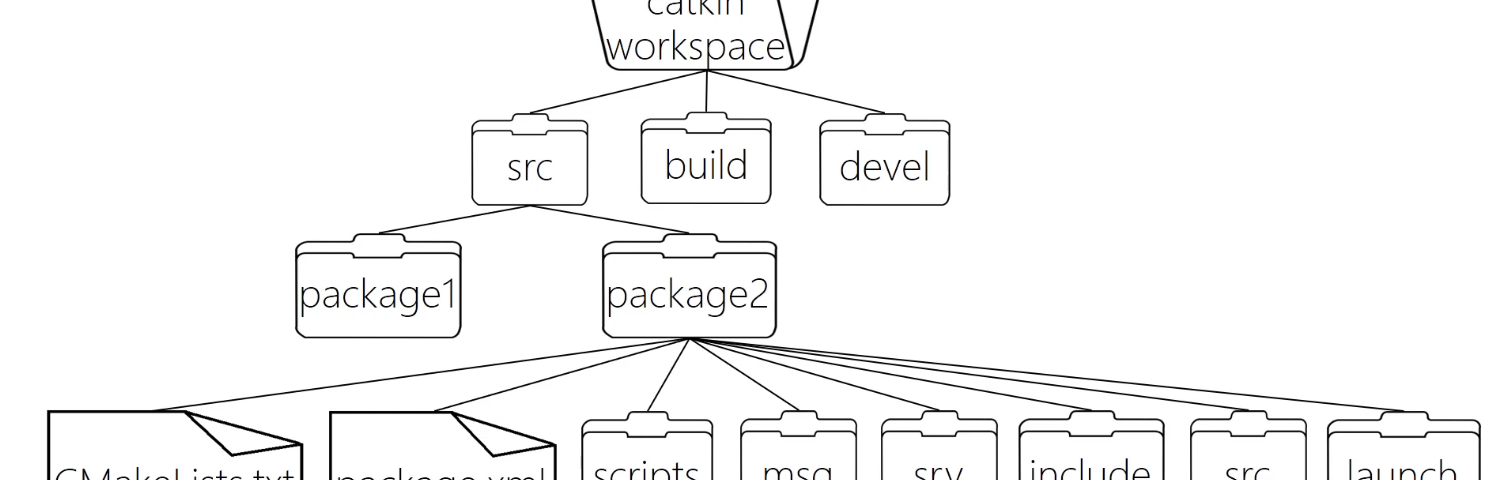
今天我們要來講 ROS 的文件系統,在 ROS 的檔案夾中,他會長下面這個樣子
你可能會覺得很複雜,接下來便一個一個來講他是幹嘛的。
今天要來說明 ROS 怎麼安裝,今天會分成 Ubuntu18.04 跟 Windwos 兩個版本來講~
在過去還沒有 ROS 的年代,我們要去設計一款機器人是非常困難的,而這邊的機器人是一個統稱,並非只單針對人型、輪型、服務型等機器人。假設我們想要去設計一款機器人,我們需要完成以下這些項目,才能製造出我們要的機器人,那有哪些呢?
在這充滿網址的時代,每次傳訊息都是一長串網址貼到群裡,總會有一種洗頻的罪惡感爽,但每次都用別人家的卻又背部起來,這時候就該來自架啦~
在開始學習撰寫程式碼之前,我們需要有一個寫程式碼的平台,讓我們可以安心的來寫程式,並可以輔助我們在寫程式時,更加的輕鬆。而在這邊將介紹我個人比較習慣拿來寫程式的平台,一個是 Sublime
今日從建築系的朋友中得知玖樓這種有趣的生活模式,而從這種生活模式我連想到了些現今校園中跨域教育的一些看法,便把它紀錄起來吧!
相信很多人在編寫程式時,都是偏向邊做邊修改的模式去進行撰寫,而非是先撰寫初一整個程式的架構再去進行編程,這樣的其況下或許速度很快,但是當你需要測試時,總在你全部編輯完畢時,才開始測試,這樣的話,當你遇到bug時,你總需要重頭開始檢查…
在去年6月,ROS終於支援Win10了~ 那就然試試看要如何去安裝吧~相關操作也可以參考ROS官網跟微軟 Github