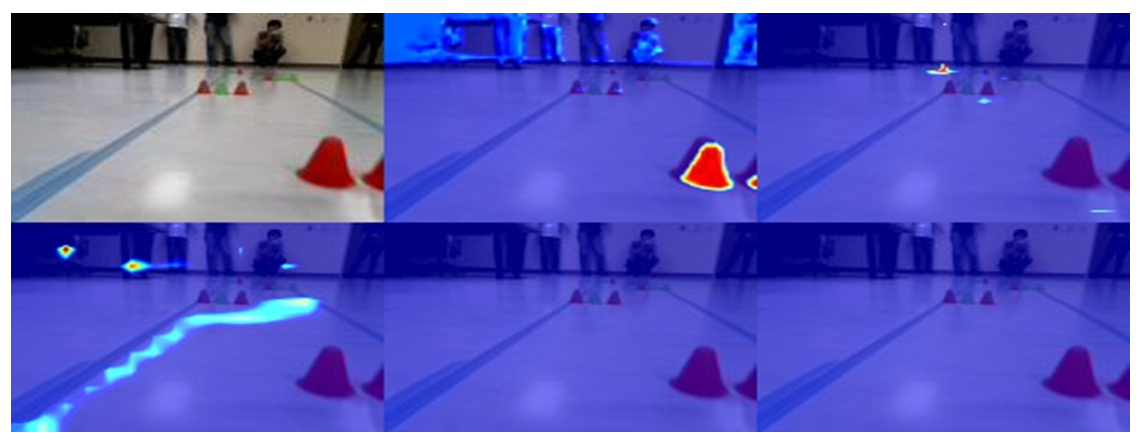
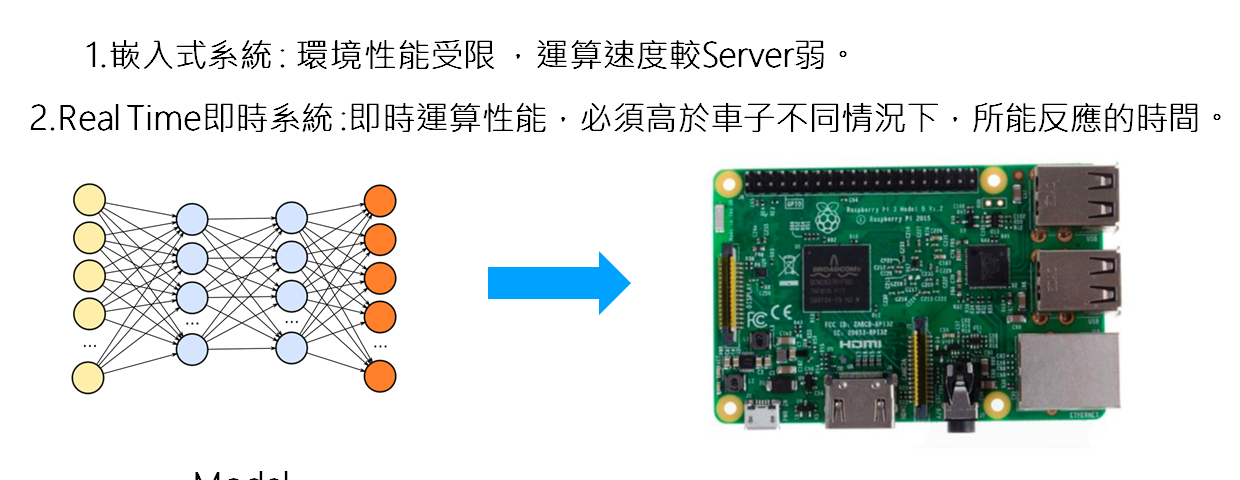
繼上篇Donkey(3)神經模型設計,這篇會介紹intel® movidius神經運算棒實做過程,以及解釋深度學習裡,神經模型學習到的特徵現象,使用Grad-CAM。
繼第二篇Donkey(2),訓練資料的蒐集方式,第三篇,會開始講述Donkey Car使用的AI模型設計考量的點。
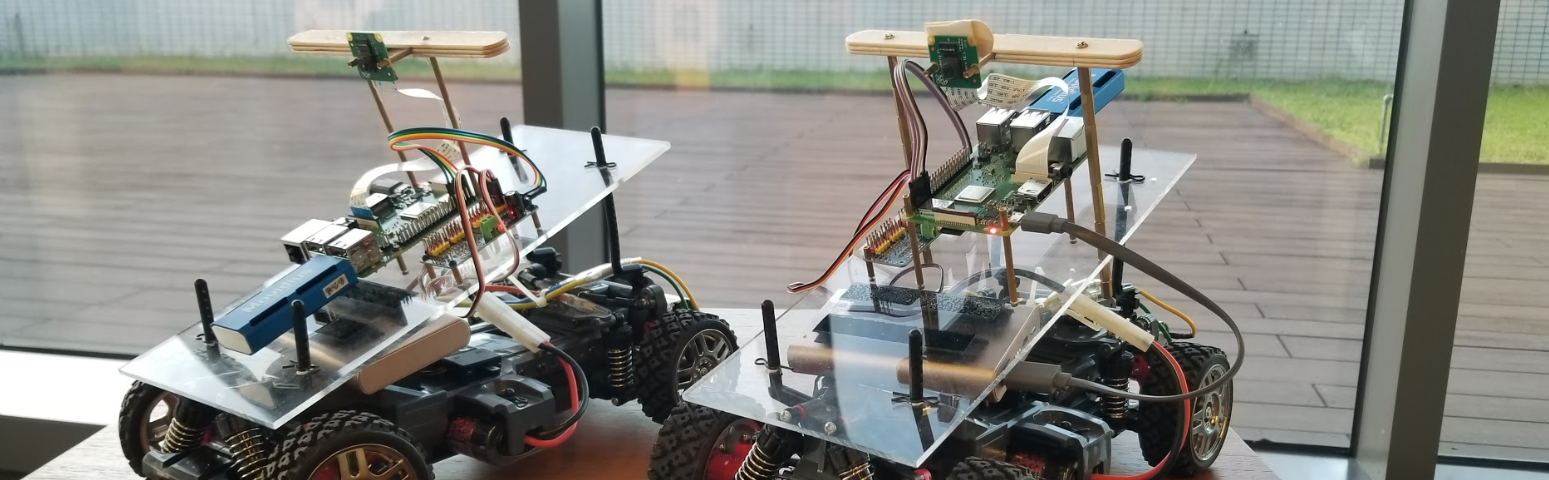
繼前篇 Donkey Car(1)介紹材料、組裝、車道設計,本篇會在Train Data蒐集、訓練方式琢磨。
前置作業,樹莓Pi的硬體接上,(1)SD卡(2)鍵盤(3)滑鼠(4)螢幕
在開始收集資料之前,我們會先練習搖桿的操作而粗略地讓車子跑個幾圈,練習手感期間不需太關注你是為了收集怎樣的訓練資料,就隨自己的意思去駕馭車子。
為什麼要練手感呢? 這是因為接下來要收集的數據可能須讓車子沿著車到線上開,或是可能會出現急煞車,亦或是在彎道不減速,這些操作技巧都很考驗操作者個靈敏度,操作失誤將使你的影像需重新錄製,浪費收集資料的時間。