Space ROS is a cutting-edge project by Open Robotics that seeks to provide a software framework for space robotics…
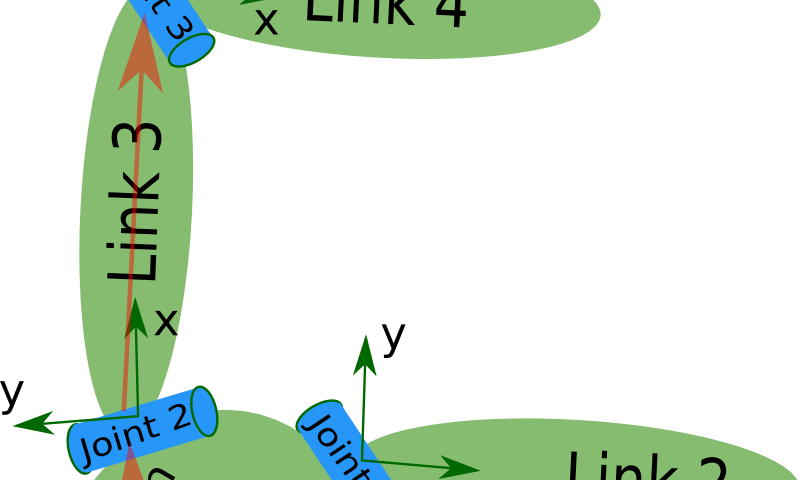
URDF는 “Unified Robot Description Format”의 줄임말로 로봇모델에 대한 정보들을 명세해놓은 규격서라고 볼수 있다.
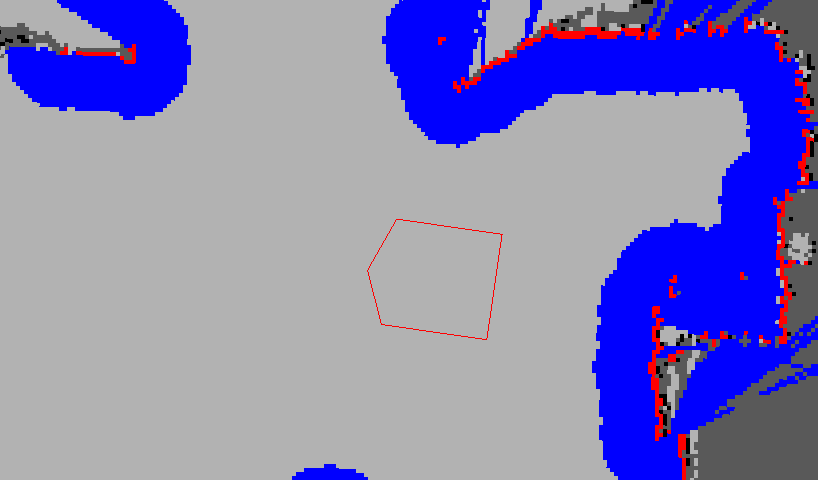
Make sure that the robot itself is navigation ready.
ROS 패키지를 개발 후 배포 할때 의존성 패키지들을 README를 통해 매뉴얼하게 빌드/설치하게 할 수 있지만, **vcs** 를 통해 빌드하게 할 수 있다. **vcs** 는 여러개의 저장소를…
**vcs**