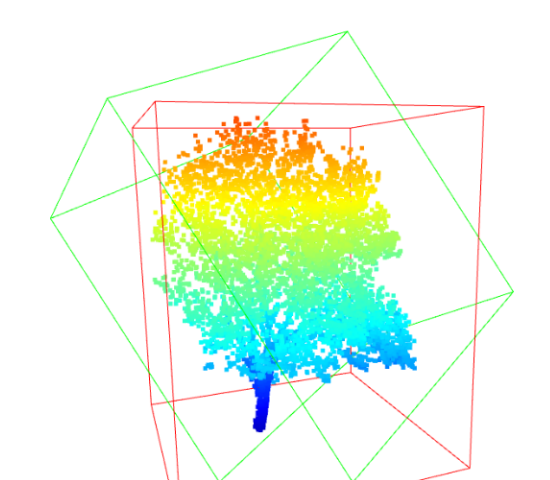
The code demonstrates how to use Open3D, a library for 3D data processing, to visualize a growing point cloud in a non-blocking way. It initializes a point cloud with a few random…
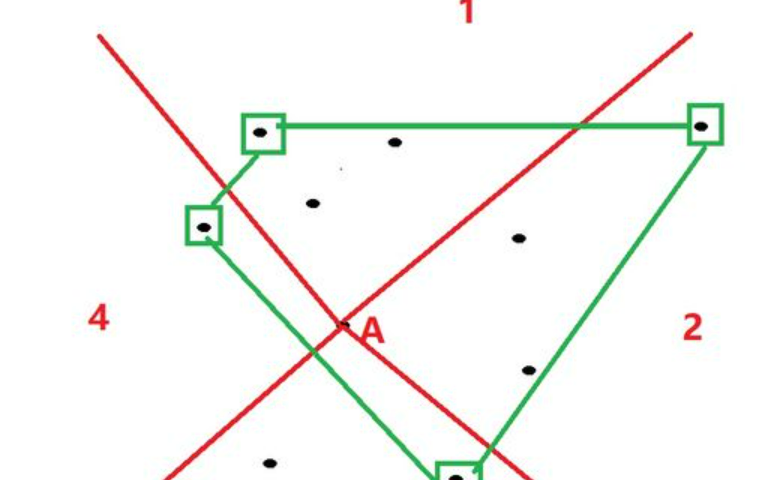
We uses the `open3d` library to fit a sphere to a point cloud using the RANSAC (Random Sample Consensus) algorithm. Here’s an explanation of the code :