mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspacecd ~/catkin_wscatkin_make
將當前的工作空間設置在ROS工作環境的最頂層
source devel/setup.bash
第二個ROS & Arduino程式(publisher)
第一個ROS & Arduino程式(publisher)
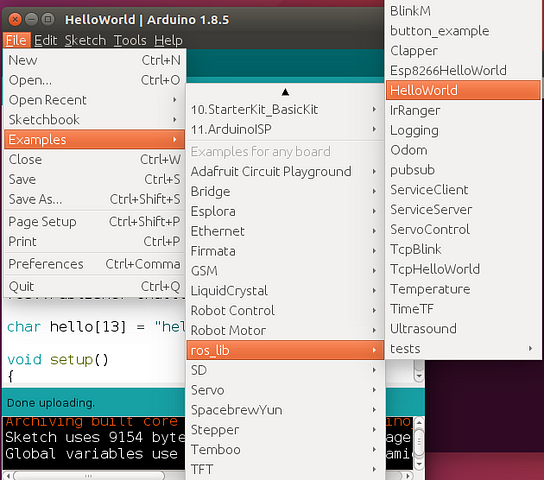
繼 <專題筆記:ROS #2>安裝完成後,我們趕緊來開始執行第一個程式
我們使用的是範例中的HelloWorld
第三個ROS & Arduino程式(subscriber)
官方網站:http://www.ros.org/