The code is a C++ program that utilizes the Point Cloud Library (PCL) to perform 3D point cloud processing tasks, specifically feature estimation and point cloud registration.
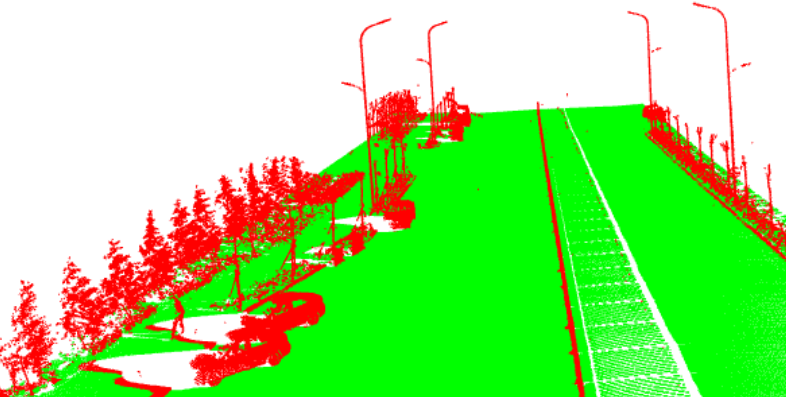
This code using the Point Cloud Library (PCL) compute the average density within the cloud.
The compute_cloud_resolution function takes a pointer to a constant PCL point cloud of type pcl::PointXYZ and…
compute_cloud_resolution
pcl::PointXYZ
save point cloud:
pcl::io::savePCDFileASCII ("ro.pcd", *cloud)…
The code is a C++ program that uses the Point Cloud Library (PCL) to load a point cloud from…
Sometimes we want to use fewer triangles to represent a high-resolution mesh, but a low resolution mesh should still be close to a high-resolution mesh. Open3D has implemented many mesh simplification algorithms for this purpose.
The VoxelGrid class of PCL creates a three-dimensional voxel grid using only the input point cloud data, and approximates other points in the voxel by using the centroid of all points within each voxel. This way, all points within the voxel are ultimately represented by a…
import open3d as o3dimport numpy as np…
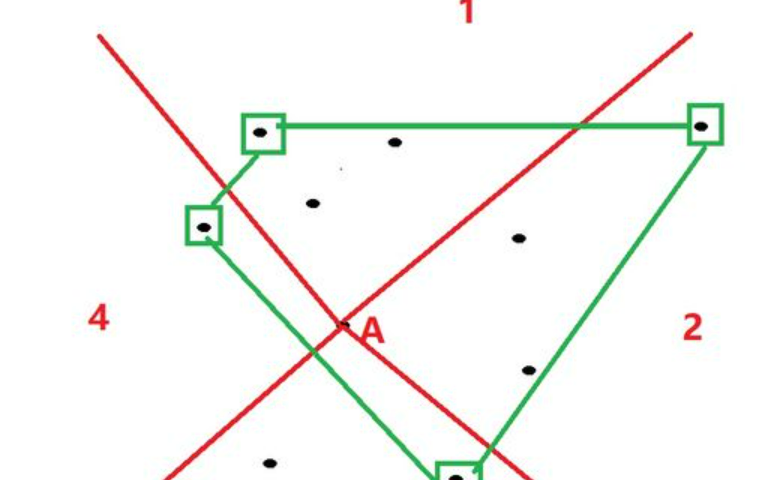
Two window were created to demonstrate the process of point cloud registration. Pressing the space key will start a registration process, and the registration will continue in this interactive iteration