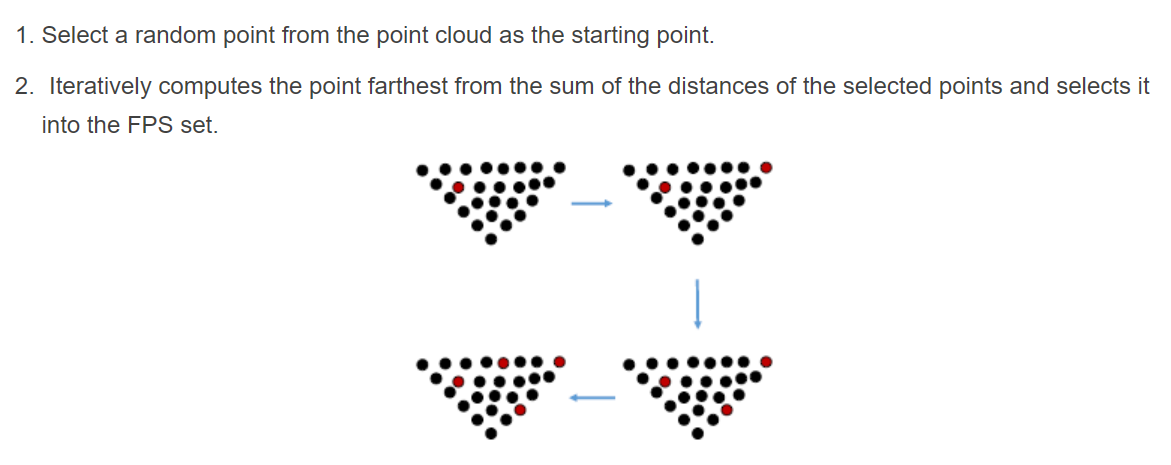
Farthest Point Sampling (FPS): As the name suggests, that is, each time you sample, you…
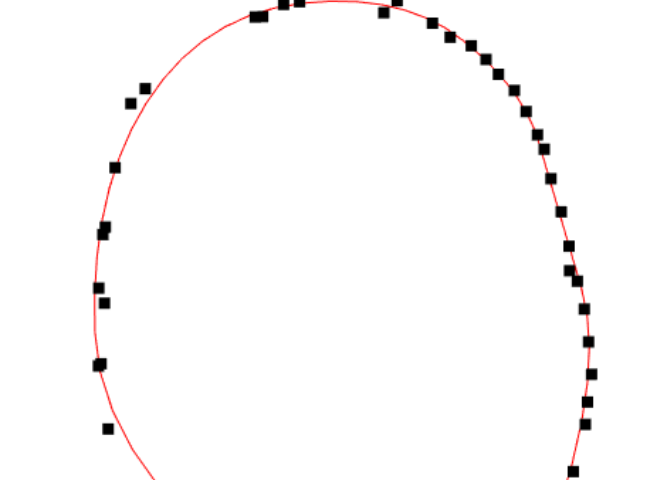
This C++ code utilizes the Point Cloud Library (PCL) to perform 2D curve fitting…
Idea: Register a callback function for the point selection event.
callback function:
way one:
**Load PCD File**: The `pcl::io::loadPCDFile` function is used to load point cloud data from a PCD file named “bunny.pcd” located in the “data” directory into the `cloud` object.
This method is mainly used for rough airborne statistics point cloud of The floor area.
The principle of themethod is to place the point cloud along XOY The surface, then the pointcloud is divided…
First, choose a tetrahedron (initial convex hull) formed by 4 points, and then add a new point P each time, divided into two cases:1.P is in the convex hull, you can skip it
method one:
Read an STL file, convert it to a point cloud, and visualize it.
**Read CAD Model**: A `vtkSTLReader` object is created to read an STL file. The file path is set, and the…
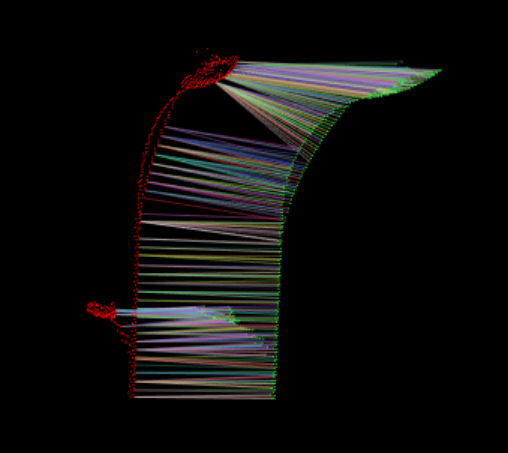
This code run a B-spline fiting algorithm on a point cloud Q to obtain a smooth, parametric surfacere presentation.
Steps:
The use of the `std::minmax_element` function to find both the minimum and maximum elements in a container.
**Array Initialization**: A `std::array` named `foo` is declared and initialized with seven integers: `{3…
Calculate the Centroid of Two Point Clouds
computational centralization vector
Calculate the covariance matrix
Press the “x” key to enter the circle selection state, and then press to exit
This C++ code utilizes the Point Cloud Library (PCL) and Boost libraries to create an interactive point cloud visualization application that allows users to select…