the main part of PrincipalCurvaturesEstimation func :
//template <typename PointInT, typename PointNT, typename PointOutT> voidpcl::PrincipalCurvaturesEstimation<PointInT, PointNT…
Implement the nearest neighbor algorithm through the constructed KD tree to perform nearest neighbor search on the points after coarse registration. Using Euclidean distance as the criterion, remove registration keypoints with Euclidean distance greater than the threshold, and save points…
The PCL .: correspondences class has two members, query and match, which are the indexes of thecorresponding point pairs on the source and target point clouds Q respectively. You can access thecorresponding points…
The code is a C++ program that uses the VTK (Visualization Toolkit) library to read a 3D model from a .ply file, calculate its mass properties such as area and volume, and visualize it.
**Reading Point Cloud Data**: A point cloud is created and read from a PCD file named “L.pcd” using…
The C++ code performs several operations, including loading point clouds, downsampling, normal estimation, feature computation, initial alignment using the Sample Consensus Initial Alignment (SAC-IA) algorithm, and visualization.
vtkMassProperties This class can realize the surface area and volume calculation of triangularmesh, but it is required that the mesh must be closed triangular mesh data. For non-triangular meshesthe mesh needs to be converted to triangular…
main func is:
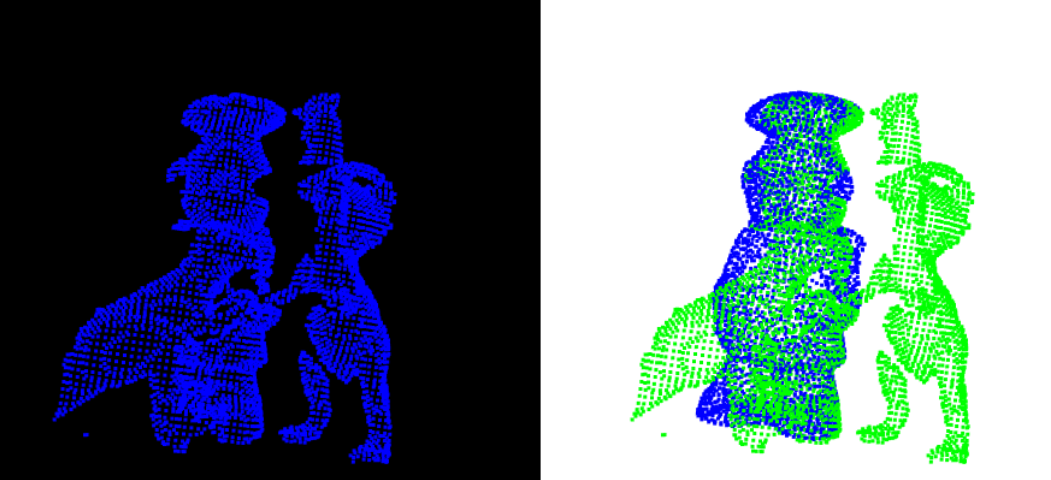
viewer->createViewPort (0.5, 0.0, 1.0, 1.0, v2);
examples, include two windows, three windows, four windows.